To keep this short and specific to the UMO I am going to assume you have installed Klipper before. Using Raspberry Pi Image flash Mainsail via Other specific-purpose OS > 3D Printing > Mainsail OS (32 Bit). Feel free to choose a hostname. I chose Ultimaker so Ultimaker.Local will provide us linux access via SSH and Mainsail access in a browser.
Login to the pi with the SSH client of your choice. Enter the following:
sudo service klipper stop
cd ~/klipper/
make menuconfig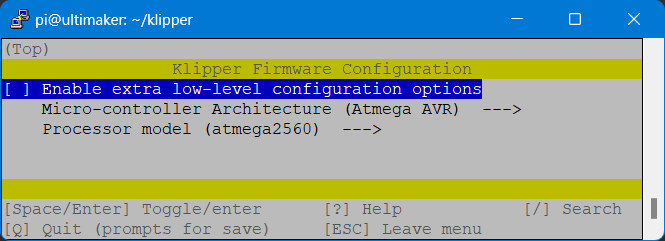
You will likely find the settings are defaulted to your needs. Atmega AVR and atmega2560. Once set hit Q and save. Then enter make into the command line. Followed by the command to get your device id.
make
ls /dev/serial/by-id/*
In this case our device id is /dev/serial/by-id/usb-Arduino__www.arduino.cc__0042_74133353437351A0A241-if00
You will need to substitute your id but in my case the command will be:
make flash FLASH_DEVICE=/dev/serial/by-id/usb-Arduino__ www.arduino.cc__0042_74133353437351A0A241-if00Once complete restart Klipper and proceed to your web browser to upload a config.
sudo service klipper restartWarnings
This config will be for a stock UMO with a 1.5.7 board, UltiController and a 12×3 Leadscrew. If your printer differs from this please take some of the following into account.
Print Area
Advertised as 210x210x205 the Marlin config is 205 cubed.
XY might reach 210 with the endstops at their far positions. My X hit at 208.
Z I have set at 200 to start for safety. 205 is fine if you don’t have a magnet/sheet on the bed.
Z Speed
Keep in mind this thing is made of plywood. The Marlin config has Z homing at 4 mm/s. You can probably go a little faster with the 12mm leadscrew but I would not bump it up too far unless using the 8mm setup.
Config
The majority of this config started from a klipper help thread. Please check the Credits/Sources below for all references I used while working on my machine.
code
[mcu]
serial: /dev/serial/by-id/usb-Arduino__www.arduino.cc__0042_74133353437351A0A241-if00
[printer]
kinematics: cartesian
max_velocity: 500 #500 Stock
max_accel: 4000 #4000 Stock
max_z_velocity: 5 #5 Stock, 10 might be okay, higher hurts the plywood.
max_z_accel: 30
[stepper_x]
step_pin: PA3
dir_pin: !PA1
enable_pin: !PA5
microsteps: 16
rotation_distance: 40
endstop_pin: ^!PA0
position_endstop: 0
position_max: 205
homing_speed: 50.0
position_min: 0
[stepper_y]
step_pin: PC6
dir_pin: PC4
enable_pin: !PA7
microsteps: 16
rotation_distance: 40
endstop_pin: ^!PA4
position_endstop: 0
position_max: 205
homing_speed: 50.0
position_min: 0
[stepper_z]
step_pin: PC0
dir_pin: !PG2
enable_pin: !PC2
microsteps: 8 #Stock 1/8, 1/16 available via jumper
rotation_distance: 3 #12mm Leadscrew
endstop_pin: ^!PC7
position_max: 200 #Stock is 205, 200 for safety
position_min: -2
homing_speed: 4
[extruder]
step_pin: PL6
dir_pin: PL4
enable_pin: !PG0
microsteps: 16
rotation_distance: 23.5
gear_ratio: 49:8
nozzle_diameter: 0.400
filament_diameter: 2.850
heater_pin: PE4
sensor_type: AD597
sensor_pin: PK0
min_temp: 0
max_temp: 270
# Dual extruder support.
#[extruder1]
#step_pin: PL2
#dir_pin: PL0
#enable_pin: !PL1
#microsteps: 16
#rotation_distance: 33.500
#nozzle_diameter: 0.400
#filament_diameter: 2.850
#heater_pin: PE5
#sensor_type: AD595
#sensor_pin: PK1
#control: pid
#pid_Kp: 22.2
#pid_Ki: 1.08
#pid_Kd: 114
#min_temp: 0
#max_temp: 275
#[heater_bed]
#heater_pin: PG5
#sensor_type: PT100 INA826
#sensor_pin: PK2
#control: watermark
#min_temp: 0
#max_temp: 100
[fan]
pin: PH4
max_power: 1
shutdown_speed: 0.0
kick_start_time: 0.1
off_below: 0.1
hardware_pwm: True
#define FAN_PIN 7 > ar7=PH4
[static_digital_output hotend_led]
pins: PB7
[display]
lcd_type: hd44780
rs_pin: PD1
e_pin: PH0
d4_pin: PH1
d5_pin: PD0
d6_pin: PE3
d7_pin: PH3
hd44780_protocol_init: True
line_length: 20
encoder_pins: ^PG1, ^PL7
click_pin: ^!PD2
[output_pin BEEPER_pin]
pin: PD3
pwm: True
value: 0
shutdown_value: 0
cycle_time: 0.001
[gcode_macro M300]
gcode:
{% set S = params.S|default(1000)|int %}
{% set P = params.P|default(100)|int %}
SET_PIN PIN=BEEPER_pin VALUE=0.5 CYCLE_TIME={ 1.0/S if S > 0 else 1 }
G4 P{P}
SET_PIN PIN=BEEPER_pin VALUE=0
[include mainsail.cfg]Credits/Sources
Marlin Config – https://github.com/gyohng/Marlin2-UltimakerOriginal/blob/2.0.x-UMO/Marlin/Configuration.h
Marlin Pin Reference – https://github.com/MarlinFirmware/Marlin/blob/1.1.x/Marlin/pins_ULTIMAKER.h
Klipper config for 1.5.7 – https://klipper.discourse.group/t/ultimaker-original-config-need-help/126/6
Klipper config for 1.5.6 – https://gist.github.com/JeremyGrosser/079d68fd2458c356b527be700c09efdb
Klipper config for v2 – https://github.com/Klipper3d/klipper/blob/master/config/generic-ultimaker-ultimainboard-v2.cfg
Updates
11/11/23 Added Beeper Pin and M300 Macro